
主营:焊缝跟踪,激光位移,空间定位,机器视觉
实现原理
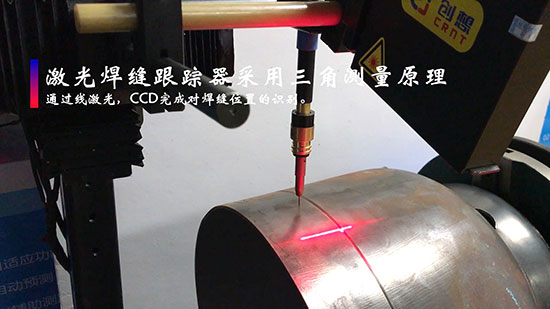
激光焊缝***采用三角测量原理,通过线激光,CCD完成对焊缝位置的识别。
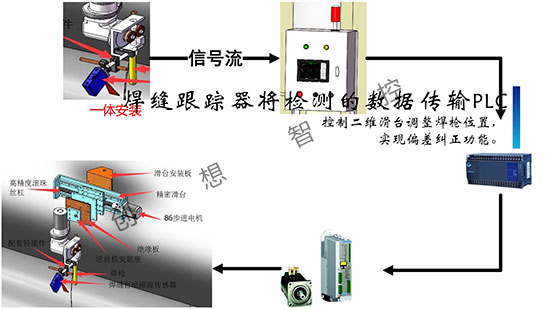
系统连接方式 数据流向
焊缝***将检测的数据传输PLC,控制二维滑台调整焊枪位置,实现偏差纠正功能。
功能描述
激光前置测量焊缝的偏差,存储到运动控制器(PLC)中,控制器根据转过的角度,修正补偿偏差,实现对焊缝的对准。
功能演示
回放(摆动)***圈实时跟踪过程中,记录运动的轨迹。当有需要多层多道焊接需求时,回放***圈数据即可。同时还能设置焊道的摆幅、摆频、相邻偏置等参数。
版权所有©2024 产品网