
主营:Continental马牌同步带SYNCHROFLEX同步皮带ContinentalContiTech康迪泰克中国代理德国马牌人字齿同步带轮NSK进口轴承提升机皮带三角带同步轮
| 同步带同步轮在二维高速运动机器人应用 |
| 来源:www.hxbelt.com |
|
上海汇昕同步带,同步带轮在自动化机器人上得到大量应用 本发明公开一种同步带传动二维高速运动机器人,有两条平行设置的相同结构的框架,两条平行设置的框架上分别安装有***直线导轨,之间可移动地连接有移动横梁;在两条框架的相同端各自设置一组具有主动轮的驱动机构,另一端各自设置有一个第二从动轮,在移动横梁上位于分别与两条框架内侧形成的四个直角处各固定连接一个***从动带轮,主动轮通过同步皮带连接四个***从动同步轮和两个第二从动带轮;移动横梁上还设置有第二直线导轨,第二直线导轨上可移动地设置有终端作用器连接板,终端作用器连接板的两侧与同步皮带固定连接。本发明自身的运动惯量小,可实现高速运动,结构简单,成本低。可实现一定范围内二维高速平面运动,具有运动平稳,速度高,可达 400m/s 。 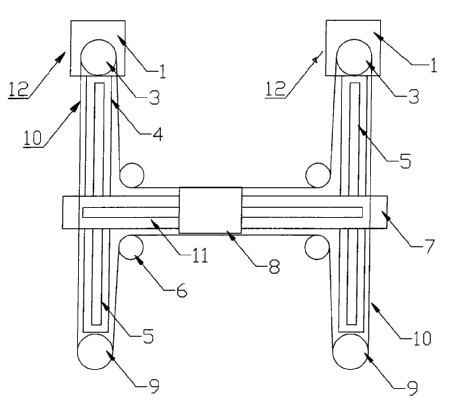 1 .一种同步带传动二维高速运动机器人,包括有两条平行设置的相同结构的框架 ( 4 ) ,其特征在于,所述的两条平行设置的框架( 4 )上分别安装有***直线导轨( 5 ) , 两条平行设置的框架( 4 )之间还可移动地连接有移动横梁( 7 ) ;在两条框架( 4 )的相同端各自设置一组具有主动轮( 3 )的驱动机构( 12 ) ,在两条框架( 4 )的另一端各自设置有一个第二从动轮( 9 ) ,在移动横梁( 7 )上位于分别与两条框架( 4 )内侧形成的四个直角处各固定连接一个***从动轮( 6 ) ,所述的主动轮( 3 )通过同步皮带( 10 ) 连接四个***从动轮( 6 )和两个第二从动轮( 9 ) ;所述的移动横梁( 7 )上还设置有第二直线导轨( 11 ) ,所述的第二直线导轨( 11 )上可移动地设置有终端作用器连接板( 8 ) , 所述的终端作用器连接板( 8 )的两侧与同步皮带( 10 )固定连接。 2 .根据权利要求 1 所述的同步带传动二维高速运动机器人,其特征在于,所述的驱动机构( 12 )包括有伺服电机( 1 )和连接在伺服电机( 1 )上的减速器( 2 ) ,所述的主动轮( 3 )与减速器( 2 )的传动轴相连。 3 .根据权利要求 1 所述的同步带传动二维高速运动机器人,其特征在于,所述的移动横梁( 7 )的两端是通过滑块可移动地安装在***直线导轨( 5 )上。 4 .根据权利要求 l 所述的同步带传动二维高速运动机器人,其特征在于,所述的终端作用器连接板( 8 )是通过滑块可移动地安装在第二直线导轨( 11 )上。 5 .根据权利要求 1 所述的同步带传动二维高速运动机器人,其特征在于,所述的***直线导轨( 5 )安装在框架( 4 )的上侧或下侧。 6 .根据权利要求 1 所述的同步带传动二维高速运动机器人,其特征在于,所述的第二从动带轮( 9 )可沿框架( 4 )纵向移动。
技术领域 背景技术 现代工业中,大规模机械化生产必将成为一种主流,机械化生产具有生产质量稳定,可靠等诸多优点。在机械化生产的很多场合,都会用到机器人,同其他机械机构相比,机器人操作的柔性较好,易于实现生产智能化;同人工操作相比,机器人具有质量可靠,运动***,同时适用于某些特殊场合,例如***,***,高***作业等。
发明内容
在实际应用中,一般通过 PLC ,或工业控制计算机的双轴伺服运动控制卡,以要求终端作业原件必须通过特定的轨迹运动,运动轨迹的描述可以通过逐点描述的办法,然后通过运算转换为两个伺服电机的位移量来实现。 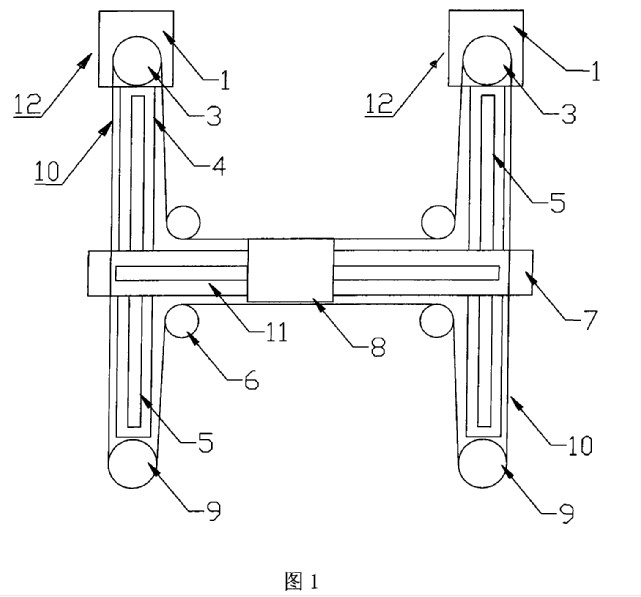 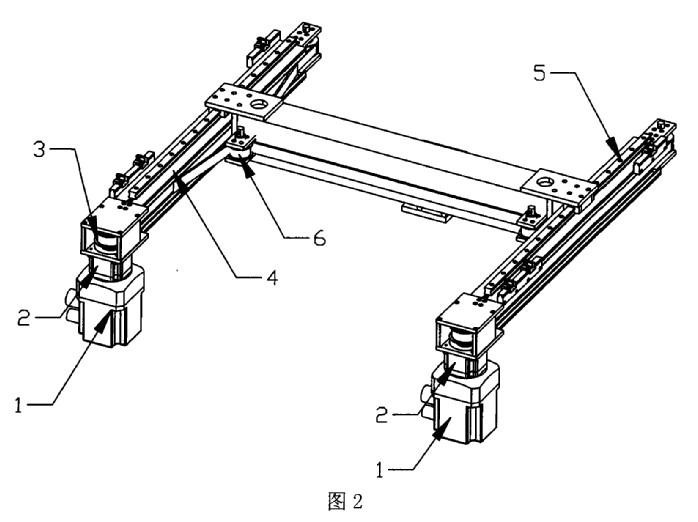  |
版权所有©2025 产品网
