
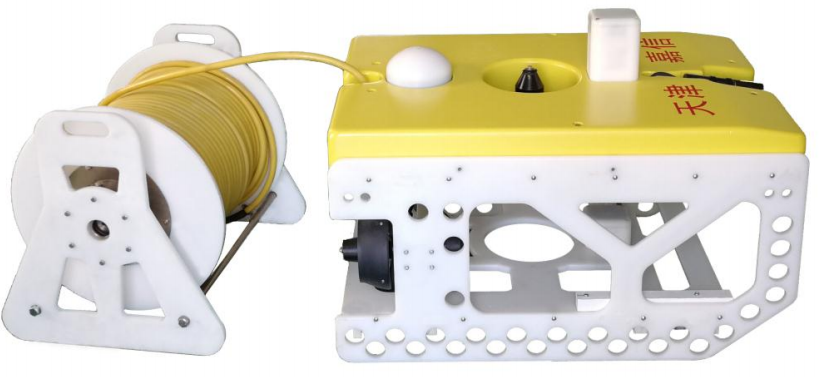
江河水下管道外腐蚀检测系统River-ROV
一、江河水下管道外腐蚀检测系统River-ROV简介:将用于海底管道探测的ROV(RemoteOperatedVehicle)技术,与陆上埋地钢质管道的腐蚀检测技术相结合,***应用于长输油气管线穿越江河管道的检测系统River-ROV。该检测ROV系统属于缆控水下机器人检测装置,由水上操控显示终端和水下检测装置等部分组成,水上和水下部分通过脐带缆实现连接,水上发电机提供动力。ROV系统整合管道***、阴保电位CIPS测量、电位梯度DCVG检测、管道埋深测量、光纤通讯、GPS***、数据库及检测数据分析等技术手段,实现对江河管道外防腐与保护状况(ECDA方法)等多方面的检测和评价。通过对水下管道埋设环境、阴极保护电位,防腐层损伤等状况的检测,可使管线运行单位对水下管道的外防腐以及阴极保护状况做出科学评价,并可基于评价结果采取加大保护电流,补加牺牲阳极等方式,提高管道保护程度,控制管道腐蚀事故发生风险,保障油气管线运行安全。二、江河水下管道外腐蚀检测系统River-ROV功能特点超深管线精准***测深外防腐层破损查找***管道外防腐层状况评价管道阴极保护效果评价水下管道敷设环境调查穿越管道完整解决方案三、技术参数1.系统基本参数1.1结构:框架式1.2材质:聚乙烯1.3外形尺寸水下装置:900mm×630mm×380mm控制终端:490mm×430mm×220mm1.4密封舱材质:硬质铝合金尺寸:Ø172mm×500mm1.5装置重量:水下:75kg水上:25kg1.6ROV***大下潜深度:100m(耐压300m),基本型:60m升级型:80m,加强级:100m1.7脐带缆长度:基本型:60m升级型:80m,加强级:100m1.7电源功率:4000W1.9供电方式:220V交流发电机供电1.10视频:水下灯光:20W/LED灯2组水下摄像:分辨率936×7022.控制终端系统2.1主处理器:工业级i5处理器2.2操作系统:上位机:Windows7下位机:WindowsCE6.02.3手柄控制推进器实现水下机器人的上升、前进、下潜等姿态,从而实现水下管道的检测2.4可视控制系统实时显示水下机器人的姿态、推进器的状态、水下摄像视频、声呐扫描状况、位置信息(深度、距离、水深)、GPS信息(精度、纬度、高程)、姿态信息(俯仰角、翻滚角、方位角、加速度、)、电位信息(Von、Voff、Gon、Goff)、电位曲线等2.5控制箱:ABS工程塑料尺寸:490mm×430mm×220mm3.运动系统3.1水平推进器:2组,基本型:国产推进器12Kg升级型:国产推进器15Kg加强型:美国原装进口17Kg3.3垂直推进器:1组,基本型:国产推进器12Kg升级型:国产推进器15Kg加强型:美国原装进口15Kg3.4水下行驶速度:前进3节3.5上升、下沉速度:1节4.测量系统4.1管道***精度:&plu***n;0.5m4.2管道***深度:河床下0-20米埋深测量精度:&plu***n;5%实际埋深4.3电位采集:测量管地电位通、断电位,电位梯度通断电位;4.4电位测量传感器:***铜参比电极3支测量精度:1.5mV4.5防腐层破损***精度:&plu***n;0.5m4.6声呐:4.6.1基本型:国产声纳886BFS加强型:美国BlueView***00-902D多波束成像声纳5.供电系统5.1发电机:基本型:国产4000W发电机加强型:日本原装4000W发电机5.2电源转换系统:220V交流转400V直流电源4000W10A大功率输出6.附属检测设备6.1尾线绞架:2.5平方毫米线缆可绕长度500米,手动摇杆收放自如6.2阴保电流中断器:GPS定时,同步通/断阴保电流中断电流50A。6.3脐带缆及绞架:零浮力脐带缆及绞架,长度根据型号有区分。6.4150W大功率发射机:基本型:无。加强型:有。6.5静态阴保电位记录仪:基本型:无。加强型:有。6.6阴极保护数据分析软:实现阴保电位的采集数据分析。6.7ECDA外腐蚀直接评价系统:基本型:无。加强型:有。6.8随机工具箱:内含现场工具及接线板四、江河水下管道外腐蚀检测系统River-ROV配置要求:水下ROV检测机器人1套,水上操控、显示单元1套,零浮力脐带缆及绞架(带多路信号光电滑环),阴保电流断流器2台,150W大功率检测信号发射机1台,静态保护电位记录仪1套,400V/4kW直流电源转换器1台,4kW***发电机1台,2.5mm2钢质尾线及绞架2套,阴极保护数据分析软件1套,ECDA钢质管道外腐蚀评价支持软件系统1套,随机工具箱2个。)