
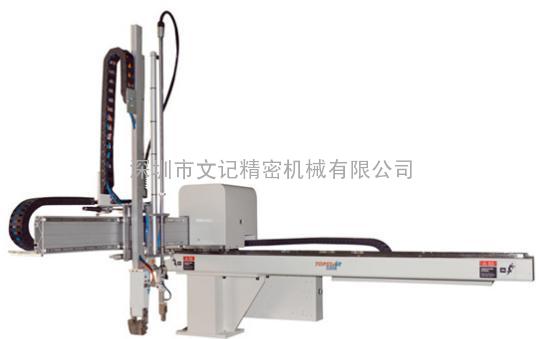
高速精密机械手
价格:19999.00
工作步骤注塑用机械手在抓取制品及喷洒脱模剂时一般采用如下的工作步骤:机械手手臂下降并引发注塑机开模-注塑机顶出注塑制品并向机械手发出。顶出信号—机械手伸入模腔中抓取制品-机械手向模腔喷洒脱模剂—机械手上升离开模腔—机械手向注塑机发出闭模信号并引发注塑机闭模—。机械手移动到指***置处放下制品—机械手回复到原位准备进行下一次动作。技术参数编辑注塑用机械手的技术参数确定机械手的规格和工作性能,主要的技术参数有以下几点。抓重:机械手抓取制品的额定重量或载荷。手臂的运动参数包括手臂的伸缩,升降,回转等运动速度和范围。手部的抓取范围及抓取力的大小。***精度:位置的设定精度和重复***精度。***方式:点位控制或连续轨迹控制方式。驱动系统参数:控制系统参数;机械手的工作循环时间;自由度数目和坐标形式等。发展趋势编辑由于注塑机专用机械手能够大幅度的提高生产率和降低生产成本,能够稳定和提高注塑产品的质量,避免因人为的操作失误而造成的损失。因此,注塑机机械手在注塑生产中的作用变得越来越重要。目前国内的机械手类型比较简单,且大都用于取件。随着自动化技术的发展,全伺服马达驱动的注塑机械手,可以实现除取件外得其他功能,比如模内贴标、模内镶嵌、装箱、码货等更多功能;或许以后,还有更多的机械手用于上料、混合、自动装卸模具、回收废料等各个工序上,而且将朝着智能化方向发展。)