

马牌同步带/SYNCHROFLEX同步皮带传动张紧调节机构的制作工艺
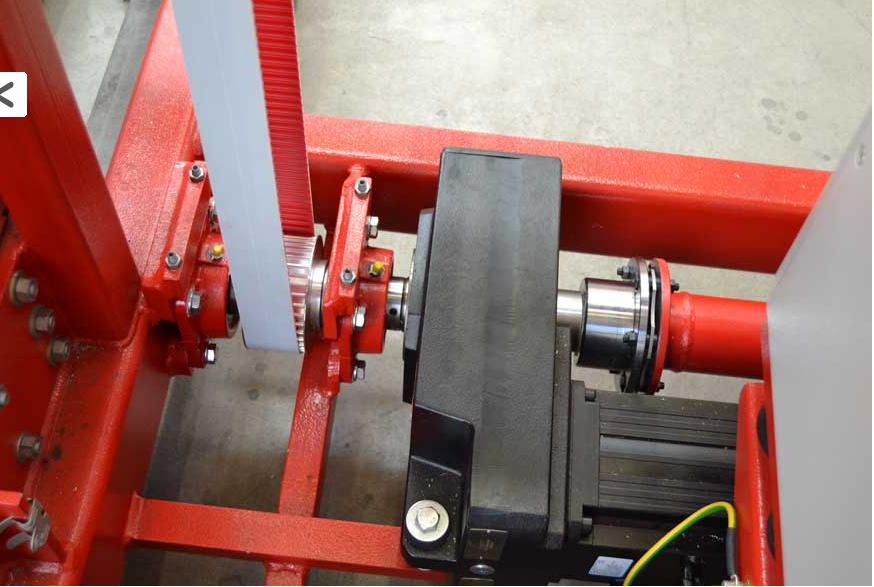
随着工业的自动化发展,工业机器人的应用越来越普遍。涉及工业机器人机械设计技术领域,特别是涉及关节机器人前臂马牌同步带/SYNCHROFLEX同步皮带传动张紧调节机构。其中,6公斤负载关节机器人,因其结构简单、空间紧凑、应用灵活,而普遍应用于上下料、小型搬运、喷漆、弧焊等领域。6公斤负载关节机器人的前臂空间狭小,部件又多,腕部传动中的马牌同步带/SYNCHROFLEX同步皮带张紧设计方案,既要紧凑又要便于调试。传统的张紧轮方法,空间大且张紧轮需要单独固定,不适于关节机器人腕部传动的应用。针对上述问题,马牌同步带/SYNCHROFLEX在于提供一种关节机器人前臂同步带传动张紧调节机构。实现上述目的,新型同步带传动张紧调节机构采用以下技术方案:关节机器人前臂同步带传动张紧调节机构,包括腕部马牌同步带/SYNCHROFLEX同步带张紧调节板、张紧板调节螺钉、腕部同步带、腕部同步带轮、腕部同步带轮、张紧板紧固螺钉及腕部电机,其中腕部同步带轮设置于腕部电机的输出轴上,腕部电机安装在腕部马牌同步带/SYNCHROFLEX同步皮带张紧调节板上,腕部同步带张紧调节板可拆卸地安装在关节机器人前臂上,腕部马牌同步带/SYNCHROFLEX同步皮带轮转动安装在关节机器人前臂上、并通过腕部同步带与腕部同步带轮I连接,通过调整腕部同步带张紧调节板的位置,实现腕部同步带的张紧调节。腕部马牌同步带/SYNCHROFLEX同步皮带张紧调节板的一侧面设有两个螺纹孔,该两个螺纹孔内分别螺纹连接有一个张紧板调节螺钉,腕部同步带张紧调节板的上下两端各有两个条形孔,各条形孔内分别插设有一个张紧板紧固螺钉,腕部同步带张紧调节板通过张紧板紧固螺钉与关节机器人前臂连接、并两个张紧板调节螺钉与机器人前臂立柱抵接,通过旋转张紧板调节螺钉,实现腕部同步带张紧调节板的位置改变。腕部马牌同步带/SYNCHROFLEX同步皮带张紧调节板上的各条形孔均沿平行于腕部同步带轮I和腕部同步带轮的轴线连线方向开设。腕部同步带轮固定安装在谐波减速器输入轴上,谐波减速器安装在关节机器人前臂上。具有以下优点及有益效果:马牌同步带/SYNCHROFLEX同步皮带没有采用常规的张紧轮结构,而是利用螺钉的螺旋传动原理实现张紧,节省空间;同时,由于螺旋运动的螺纹作用,在同步带逐渐张紧时,调试也很简便。)