
网络远程控制机械手臂机器人随动复现系统
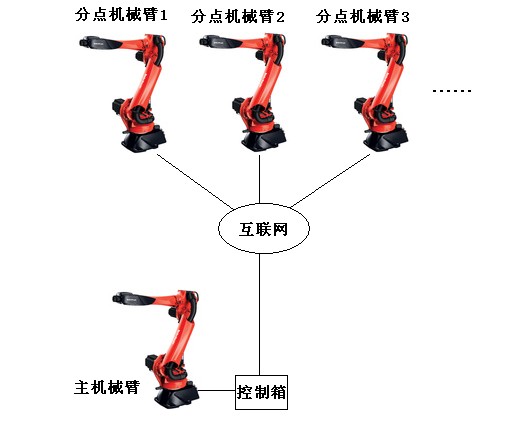
一台主控机械手臂(机器人、机械手掌、直线滑台等)的实时动作,可通过有线网络、无线WIFI、串口、485以及互联网云等通信技术,远程传输到各分点的机械手臂,然后控制所有分点的机械手臂与主控机械手臂进行同步动作,即主控机械手臂的一举一动都会通过通讯网络实时传输到各分点(机器人),然后各分点机械臂即能实时做出与远程主控机械手臂完全一模一样的动作。比如可用手随意摆动主控机械手臂做各种动作,则各分点机械手臂即会与主控做出完全一致的动作。)