

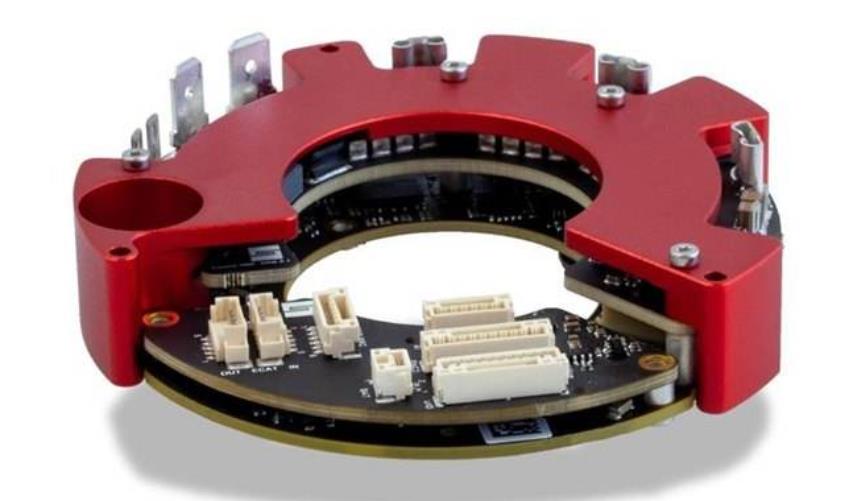
中空机器人关节驱动器
价格:88.00
赛普肯原有的SOMANET伺服驱动器作为通用产品,已被应用于传统工业机械臂、协作机器人、服务机器人、AGV、特种机械等***应用领域。Circulo系列是在SOMANET的技术基础上,针对协作机器人一体化关节,将传感、驱动、制动、传动集成一同纳入设计考虑推出的高度集成化产品。其不仅在结构外形上更适应一体化关节集成,具备模块化、易走线等特点,还为用户提供可选的集成单/双编码器方案、制动方案,对关节内部的部件集成提供设计参考和技术咨询,***终通过高度集成化设计和技术支持,在提高终端产品可靠性和性能的同时,降低用户硬件和工程成本。Circulo系列伺服驱动器技术剖析Circulo系列伺服驱动采用模块化架构,本体由IO模块、处理器模块、驱动模块、可选的传感模块和可定制的集成散热结构组成。目前系列包含两个尺寸,分别是输出700W,内径20mm,外径72mm的Circulo700,和输出1800W,内径40mm,外径92mm的Circulo1800,并为深度用户提供基于机械结构定制的尺寸微调。Circulo伺服驱动器主要面向常见于机器人关节的三相交流电机,如直流无刷(BLDC)、永磁同步(PM***),并可选于本体集成两枚绝dui值编码器(18位,可选电池多圈),内含自动校准。除内置编码器外,其也提供外部编码器接口,可适配***多两枚外接编码器,支持ABZ、SSI、BiSS-C、A-format等协议。在提供集成式产品加速机器人研制开发的同时,也提供适配的自由度,利于过渡及测试。Circulo伺服驱动器在控制算法方面采用独有的基于模型预测的矢量控制算法(Model-predictiveFOC),结合采用******的开关元件制作的现代微型逆变器,使得驱动器在维持高控制频率,满足精密控制需求的同时维持低热耗,满足微型驱动产品需求。其本体也在多年的经验积累下,综合考虑了一体化关节的集成设计,提供充分的散热能力。在通信方面其采用EtherCAT总线通讯技术。作为基于以太网的新一代总线技术,EtherCAT具有***的实时性和同步性,并支持多种设备连接拓扑结构。同时为了满足不同用户的需求,赛普肯还可以提供Ethernet、CANopen、PROFINET、SERCOSIII、Ethernet/IP等通讯支持。在功能安全性方面Circulo板载基于24VI/O的STO(安全转矩关断)和SBC(安全抱闸控制)功能,结合安全模块将为用户提供SIL3PLe级别的安全保护赛普肯还为产品配备了专门的调试工具OBLAC,其直观的用户界面提供多种调试功能,使得用户的设置调试过程十分简便。软件提供基于系统辨识和主导极点配置的控制器自动调参功能,为用户一键实现鲁棒控制,并提供响应时间、带宽等参数滑条,供用户拖拽实现控制器微调,同时也为熟练用户提供手动调试接口。Circulo作为一款标准伺服产品,开创性的***实现了协作机器人关节需求的***覆盖,支持双/单编码器方案,同时可选集成编码器方案,驱动器自带单/双绝dui值编码器(18Bit),与传统双编码器方案相比,节省50%以上空间,同时提供24VI/O的STO和SBC功能,超简化接线,同时可提供插销式制动器可选配置以及电机温度传感器接口(PT100,PT1000,KTY)。功能特点1.模块化结构–便于快速调整,如接口PCBA及编码器磁环。2.简化布线–菊花链结构覆盖EtherCAT、逻辑供电、STO和SBC。3.安全性–板载基于24VI/O的STO和SBC(安全抱闸控制),TÜV认证SIL3PL-e。4.超***率–基于模型预测的矢量控制算法,在保证高频率运动控制的同时维持低热耗。更多选配和定制:1.可选PoE(PoweroverEtherCAT)2.可选集成插销式抱闸,包含抱闸环3.可选集成1到2枚绝dui值编码器(18位,可选14位电池多圈)4.安全运动模块,包含基于FSoE,SIL3PL-e级别的STO,SBC,SS1,SS2,SLP,SLV,SP技术参数规格型号C700C1800驱动电机类型BLDC/PM***额定电压12-48VDC(Max65VDC)持续电流8Arms20Arms峰值电流(负载循环0.5s/1.5s)24Arms60Arms反馈类型1xABI/SSI/BISS-C/Nikon/Tamagawa支持通讯EtherCAT模拟量输入4×5VDIO,1×24VDI制动器输出1A@0-48VPWM输出效率99%尺寸OD72mm,ID20mmOD92mm,ID40mm保存温度-35~85°C环境温度0~50°C湿度Max90%rH集成编码器(电机端)可选集成编码器(输出端)可选集成制动器可选硬件保护过电流,过电压,欠电压,温度集成编码器技术指标:编码器1(输入端)C700C1800分辨率18bit多圈位数14bit(需要电池)安装位置及功能1:输出端-位置环反馈@双编码器方案2:电机端-位置/速度/电流环(换向)反馈@单编码器方案精度待定编码器2(输出端)C700C1800分辨率18bit多圈位数不支持安装位置及功能1:电机端(速度)@双编码器方案注:单编码器配套编码器1双编码器:配套编码器1+编码器2集成制动器技术指标:C700C1800制动方式电磁式插销制动器详细参数待定注:Light版本外径小(见CAD)不能集成制动器集成制动器需提供设计沟通应用1.AGV2.特种机械3.协作机器人4.服务机器人5.服务机器人6.传统工业机器人)